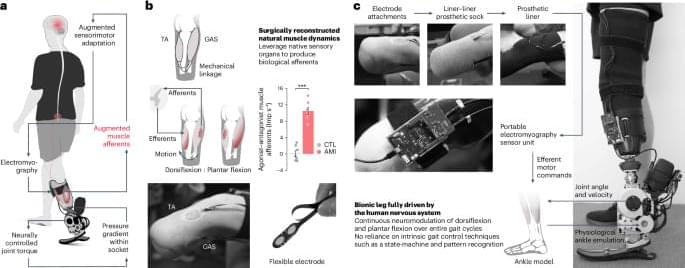
In this study we show that residual muscle–tendon afferents enable a person with transtibial amputation to directly neuromodulate biomimetic locomotion, enabling neuroprosthetic adaptations to varying walking speeds, terrains and perturbations. Such versatile and biomimetic gait has not been attainable in contemporary bionic legs without the reliance upon predefined intrinsic control frameworks1,2. Central to the improved neural controllability demonstrated in this study are muscle–tendon sensory organs26,27 that deliver proprioceptive afferents. The surgically reconstructed, agonist–antagonist muscles emulate natural agonistic contraction and antagonistic stretch, thereby generating proprioceptive afferents corresponding to residual muscle movements.
During the ground contact phase of walking, the reconstructed muscle–tendon dynamics of the AMI do not precisely emulate intact biological muscle dynamics. The residual muscles of the AMI contract and stretch freely within the amputated residuum, only pulling against one another and not against the external environment. In distinction, for intact biological limbs, the muscle–tendons span the ankle joint, exerting large forces through an interaction with the external environment. These interactive muscle–tendon dynamics in intact biological limbs are believed to play a critical role in spinal reflexes, in addition to providing feedback for volitional motor control12. Therefore, for this study, the demonstrated capacity of augmented afferents to enable biomimetic gait neuromodulation is surprising given that their total magnitude is largely reduced compared with those of intact biological limbs26,27,45,46.