SPHEREx could, though (in a way).
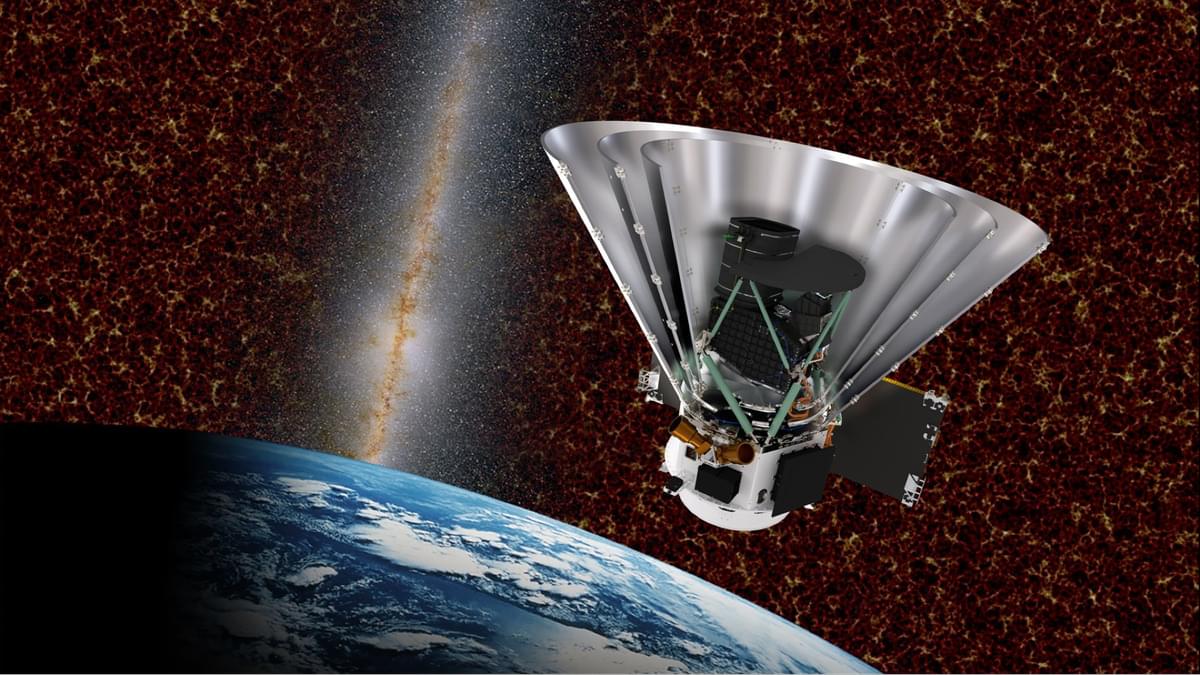
To be fair, SPHEREx won’t rival the JWST’s ability to observe highly localized regions of the universe that are confined to the infrared section of the electromagnetic spectrum. However, unlike the JWST, it is an all-sky survey. Whereas the $10 billion JWST is great at observing things like specific nebulas and relatively narrow but tremendously dimensional deep fields, SPHEREx is intended to image the entire sky as seen from Earth.
“We are literally mapping the entire celestial sky in 102 infrared colors for the first time in humanity’s history, and we will see that every six months,” said Nicky Fox, associate administrator for NASA’s Science Mission Directorate. “This has not been done before on this level of color resolution for our old sky maps.”